| 上一篇 | 目录 | 下一篇 |
有些飞控板 (Copter-3.6, Plane-3.9, Rover-3.5)运行体积较小的ChibiOS系统,而不是ArduPilot系统。这些飞控板的有OpenPilot RevoMini、Mateksys F405-Wing和Omnibus F4 Pro。
大多数情况下,这些飞控板预装了另一种飞行控制软件。(如果飞控板上已经安装了ArduPilot,请访问《Mission Planner 装载固件》)
在这些飞控板上安装ArduPilot流程:
- 安装所需驱动程序和刷固件工具
- 下载相应的ArduPilot固件
- 装载ArduPilot到飞控板
下载驱动程序和刷固件工具
STM32Cube(64位下载、32位下载)程序将安装用于固件直接上传的DFU驱动程序,并在DFU模式下给飞控板刷固件。程序适用于Windows、Linux和MacOS系统。
下载ArduPilot固件
从firmware.ardupilot.org下载飞控板的ArduPilot固件。你可以通过以下方法找到合适的固件:
- 打开firmware.ardupilot.org
- 选择飞行器类型
- 选择“beta”或“stable(稳定版)”
- 查找与飞控板最匹配的目录
- 下载“arduXXX_with_bl.Hex”文件保存到你电脑。
使用Beta和开发版
Beta
在发布稳定版本之前,会发布一个或多个Beta版本。如果你希望尝试最新的特性或帮助开发人员进一步测试代码,可以使用Beta版。因为它们是“beta”版本,可能有bug(但即使稳定固件也会有Bug)。不过,它已经经过了开发团队的测试,并且已经进行了飞行测试。这个版本目的是让更多的用户在固件以稳定的形式发布之前进行最终测试。我们鼓励有经验的ArduPilot用户试用这个固件并提供反馈。
最新开发版
这个版本反映了ArduPilot代码开发状态。开发团队已经对它进行了审查,并通过了所有的自动化测试。并且在大多数情况下,如果进行大的改动,就会进行测试。这些代码每天都要构建,可供有经验的用户测试。这与“alpha”版本相对应,并且可能有bug,尽管很少会“导致崩溃”重大问题。
上传固件到飞控板
- 按住飞控板的DFU按钮或把“BOOT”引脚短路,再插入USB线(连接到您的PC),通电后立即释放DFU按钮或断开“BOOT”引脚。
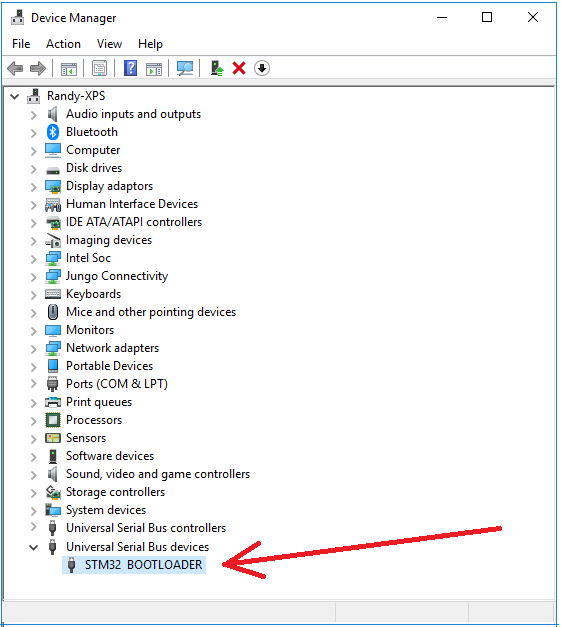
- 打开windows设备管理器,在“通用串行总线设备”下查找“STM32 BOOTLOADER”,确认飞控板处于DFU模式。
- 运行STM32Cube程序
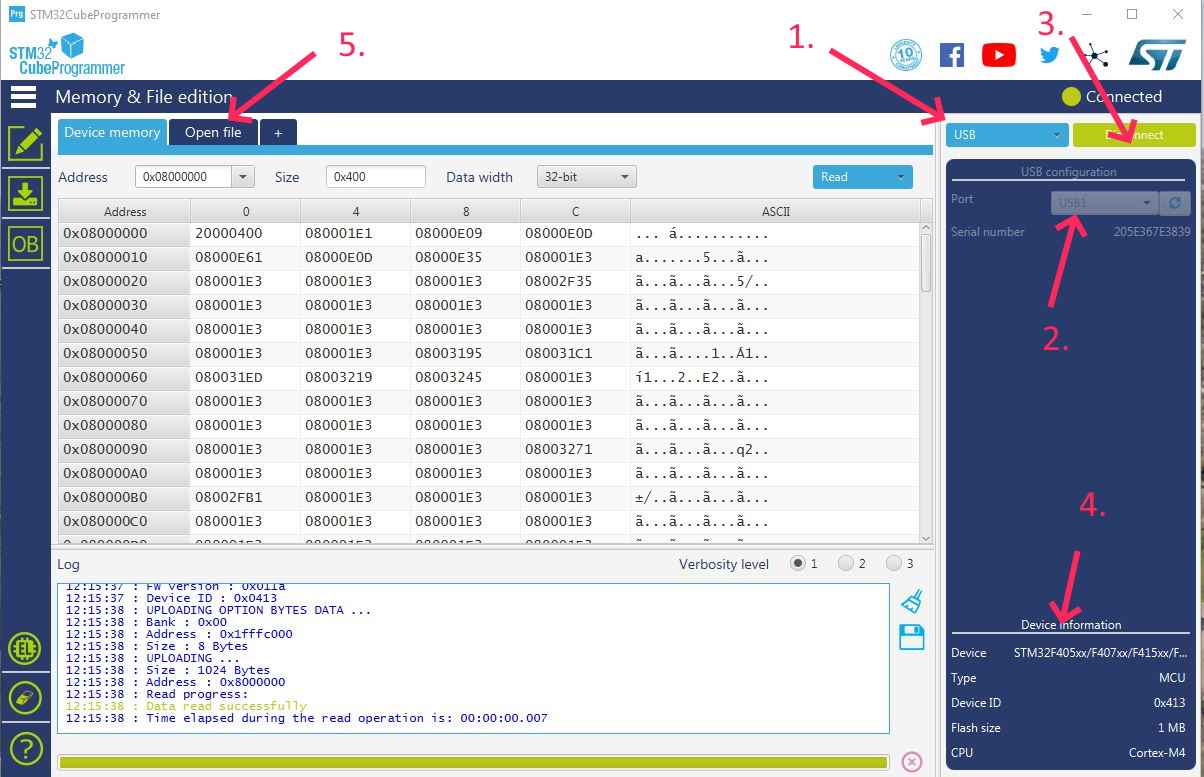
- 选择连接方式:USB
- 确保USB端口显示正确,这意味着在DFU模式下检测到飞控板。
- 点击“Connect”
- 飞控板的详细资料在这里显示。
- 点击“Open File”选择你刚才下载的Hex文件。
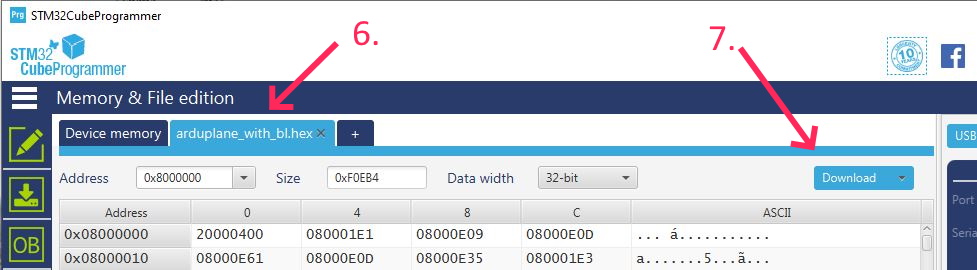
- 文件名将出现在选项卡中。
- 点击“Download”将Hex文件刷到飞控板上。
你现在可以重新启动飞控板,并连接到地面站(Mission Planner,QGC等),以后固件升级就可以使用正常的方式进行。
替代方法
下载和安装Zadig(只兼容Windows)
- 下载并运行Zadig程序,使用USB线连接电脑和飞控板。
- 点击“options”菜单中的 “List all devices”。
- 从下拉菜单中选择“STM32 BOOTLOADER”,点击下“Replace Driver”按钮。

- 或者,你需要检查下飞控板是否已经通过USB成功连接上电脑:
- 按住飞控板的DFU按钮(或者短路“BOOT”引脚)后,插入USB线并连接到电脑。
- 打开windows设备管理器,在“通用串行总线设备”下查找“STM32 BOOTLOADER”以确认板处于DFU模式。
下载ArduPilot固件
从firmware.ardupilot.org下载飞控板的ArduPilot固件。你可以通过以下方法找到合适的固件:
- 打开firmware.ardupilot.org
- 选择飞行器类型
- 选择“beta”或“stable(稳定版)”
- 查找与飞控板最匹配的目录
- 下载“arduXXX_with_bl.Hex”文件保存到你电脑。
更新ArduPilot到飞控板
下载和安装 Betaflight Configurator
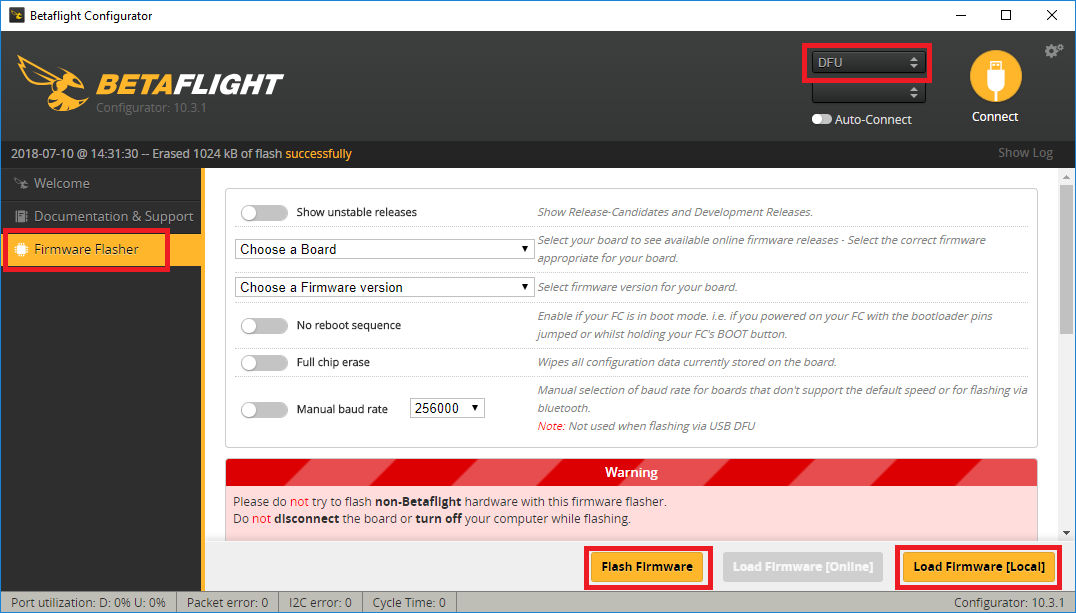
- 点击界面左边的“固件烧写工具”。
- 在界面的右上角选择DFU。
- 在界面的右下角点击“从本地电脑加载固件”,选择你下载好的固件文件。
- 点击“烧写固件”按钮,等待几分钟后完成固件加载。
你现在可以重新启动飞控板,并连接到地面站(Mission Planner,QGC等),以后固件升级就可以使用正常的方式进行。