| 上一篇 | 目录 | 下一篇 |
本文描述了ArduPilot的摄像头和云台命令,以及说明如何在Mission Planner中使用这些参数来进行摄像头勘测任务。这些说明假定已经连接和配置好快门和云台。
概述
计划一个摄像头任务几乎和任何其它带有航点和事件的任务完全一样。唯一的区别是,在一个摄像头任务中,你指定命令在航线上或飞行器移动的定期间隔触发摄像头快门。如果摄像头安装在云台上,你还可以设置云台的方向,或让它跟踪特定的兴趣点。
对于简单的任务,你可以手动指定所需的航点和摄像头命令。对于更复杂的路径和网格调查,Mission Planner通过提供工具来自动生成任意区域所需的任务,使事情变得容易。
摄像头命令
DO_SET_CAM_TRIGG_DIST — 定时触发快门。这是最常用来区域勘测。
DO_DIGICAM_CONTROL — 每次调用此命令时触发快门一次。
摄像头云台命令
如果使用了摄像头云台,你可以设置摄像头的位置(偏航、倾斜、滚动)或将其对准特定的感兴趣区域(ROI):
DO_SET_ROI -将摄像头对准特定的感兴趣区域(位置,包括高度)。
DO_MOUNT_CONTROL -用指定的滚转、俯仰和偏航来定位云台。
伺服和中继命令
使用DO_SET_SERVO或DO_SET_RELAY命令,在任务期间可以让伺服和继电器连接和激活摄像头对应的功能。
这些可能的用途是控制快门以外的摄像头功能(例如,设置变焦级别或由从视频中截取图片)。
注意:摄像头的哪些功能可以通过伺服或继电器调用,取决于摄像头及其支持的远程控制机制(参见摄像头和Gimbals维基页面的摄像头控制和地理标记部分)
自动任务类型
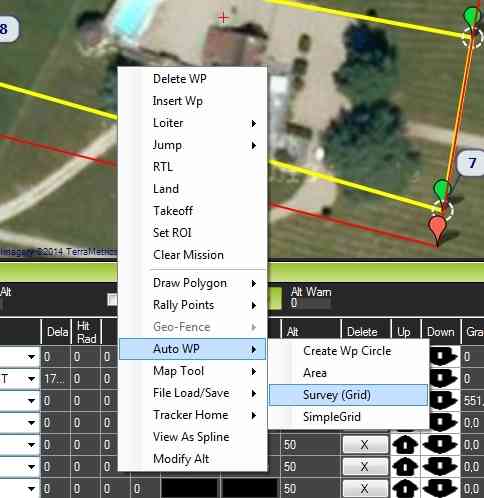
Mission Planner支持自动航点选项。打开飞行计划界面,在地图上单击鼠标右键,选择菜单”自动航点“:
创建航点圈-创建一个圆圈的航点。
区域-显示当前多边形的区域(如果有的话)。
创建曲线圈- 一个螺旋上升的航线 (与飞行器相关)。
测绘(网格)Survey (Grid)-自动创建航点和摄像头控制命令来测量指定的多边形。
测量(网格版本2) -开发中!这是一个用于创建矩形测量区域的更简单的网格方式。
简单网格:一个简单的自动创建的测绘网格。没有定义控制摄像头,所以必须单独添加。
以下部分包括在社区提供的自动测绘任务示例。
测绘(网格)Survey (Grid) 例子
Mission Planner的测绘(网格)选项自动定义覆盖任意多边形所需的路径点,并在相关的路径点上设置DO_SET_CAM_TRIGG_DIST命令,以确保在飞行器的航线上定期捕获图片。
打开飞行计划界面
在地图上点击鼠标右键,选择“绘制多边形” -> “Draw a Polygon”,在要拍摄的区域点击鼠标创建点。
在选择的的区域上点击鼠标右键,选择“自动航点” -> “Survey (Grid)”。
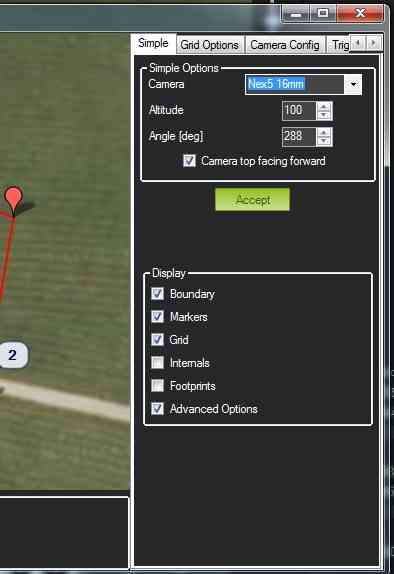
Mission Planner会显示一个配置界面,在那里你可以选择摄像头(相机)类型,高度、速度等参数,包括你想要的图片之间的重叠,镜头大小等。DO_SET_CAM_TRIGG_DIST是根据此信息自动计算的!
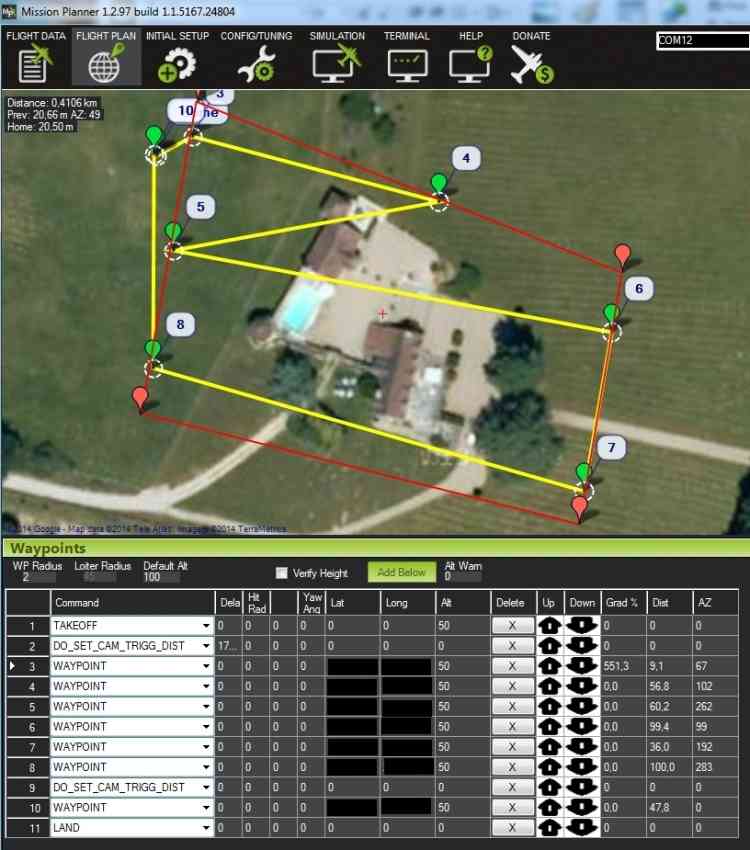
点击“Accept”按钮后,Mission Planner将生成覆盖指定区域的航点列表,包括起飞和降落航点。调用DO_SET_CAM_TRIGG_DIST命令来设置任务期间触发摄像头的两个航点之间的距离(以米为单位)。在任务的最后,再次调用DO_SET_CAM_TRIGG_DIST将参数设置为零(停止捕捉图像)。
带有航点和摄像头触发器的最终任务是这样的:
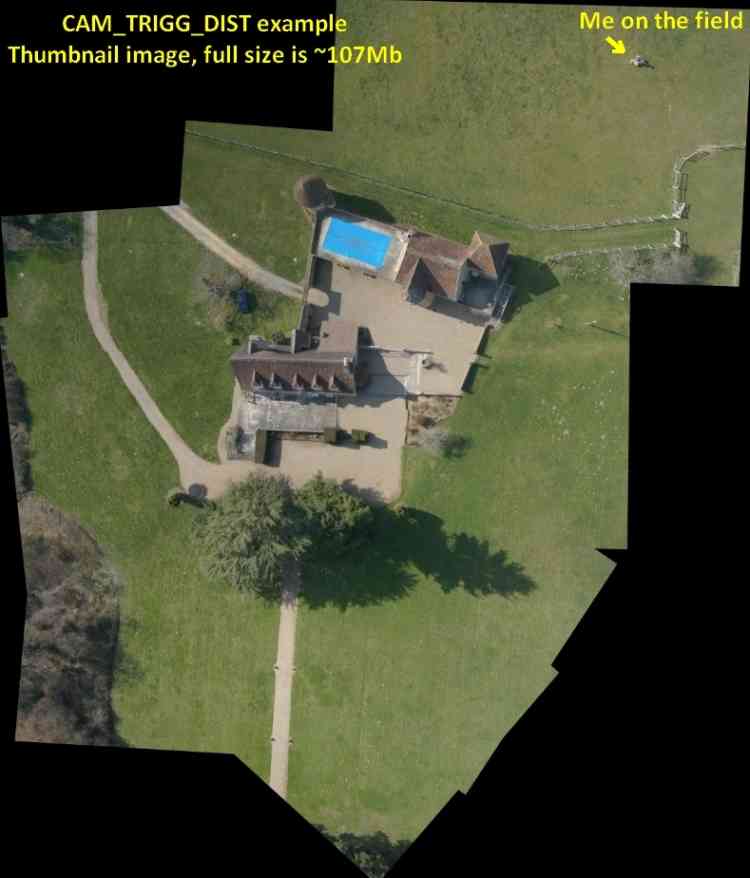
测试任务生成了15张图像,把这些图像被拼接在一起。合成图像的缩略图如下所示(只显示部分,因为完整的图像在大约107M,太大了)。
创建合成图像
这里有许多用于创建合成图像的免费和付费工具 :
Pix4Dmapper -免费版支持图像合并。
Microsoft Image Composite Editor (ICE)